Programming and Robot production Team
先日、近藤科学さんのKXRシリーズでカメ型ロボットの制作を行なったのですが、マニ…
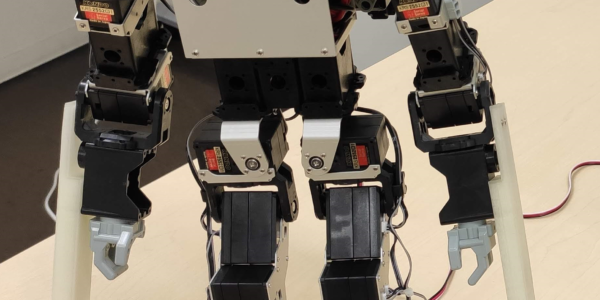
メンバーが制作している二足歩行ロボットのトリム調整が一通り完了し、歩行も安定感が…
近藤科学さんのKXRシリーズのセットでカメ型ロボットを製作しました。 とりあえず…
新型コロナウイルスの影響もあって、長く中断していたのですが、紆余曲折を経てようや…